Other¶
GPS¶
gpsd¶
gpsd是一个GPS的守护进程,用以侦听来自GPS接收器的位置信息,并将这些位置信息转换成一种简化的格式。这样就可以使用其他程序对这些数据进行分析并制作图表等。该软件包中有一个客户端,用以显示当前可见GPS卫星(如果有的话)的位置和速度。它也可以使用差分全球定位系统/ IP协议。
sudo apt-get install gpsd gpsd-clients
How to use Android phone as GPS sensor in Linux
systemctl stop gpsd systemctl disable gpsd sudo shutdown -r now # 需要关机重启,启动 启动 gpad -N .... 会报错。 sudo apt-get install adb ########### cgps gpsmon
gpsfake¶
使用gpsfake模拟GPS数据
1. 将假的gps数据存到文件中,命名为test.log. nc localhost 20175 >> test.log 或者 curl <phone ip>:port >> test.log 2. ls /dev/pts,查看现在有什么设备。我的有三个,分别是0,1,ptmx。 3. gpsfake -c 0.2 test.log # 0.2秒 发送一条数据 4. ls /dev/pts再次查看。这时候有四个了,分别是0,1,2,ptmx. 5. cat /dev/pts/2. 就可以看到假的gps数据了。 6. gpsd -F -D3 -N /dev/pts/2 7 cgps 或者 gpsmon# 8. rosrun gpsd_client gpsd_client _host:=localhost _port:=2947 #9. rostopic echo /fix
- nmea_navsat_driver
Jetson AGX Xavier¶
- 刷机 sdkmanager_1.1.0-6343
- jetpack 4.3
Configuration
nvpmodel introduces seven different “modes” on the Jetson AGX Xavier. The following table breaks down the modes which describe which CPU, GPU, DLA and VA cores to use along with their clock frequency, and the memory controller frequency.
NVPMODEL CLOCK CONFIGURATION
| Mode Name | EDP | 10W | 15W | 30W | 30W | 30W | 30W |
|---|---|---|---|---|---|---|---|
| MAXN | MODE_10W | MODE_15W | MODE_30W_ALL | MODE_30W_6CORE | MODE_30W_4CORE | MODE_30W_2CORE | |
| Power Budget | n/a | 10W | 15W | 30W | 30W | 30W | 30W |
| Mode ID | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| Number of Online CPUs | 8 | 2 | 4 | 8 | 6 | 4 | 2 |
| CPU Maximal Frequency (MHz) |
2265.6 | 1200 | 1200 | 1200 | 1450 | 1780 | 2100 |
| GPU TPC | 4 | 2 | 4 | 4 | 4 | 4 | 4 |
| CPU Maximal Frequency (MHz) |
1377 | 520 | 670 | 900 | 900 | 900 | 900 |
| DLA Cores | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| DLA Maximal Frequency (MHz) |
1395.2 | 550 | 750 | 1050 | 1050 | 1050 | 1050 |
| Vision Accelerator (VA) cores | 2 | 0 | 1 | 1 | 1 | 1 | 1 |
| VA Maximal Frequency (MHz) |
1088 | 0 | 550 | 760 | 760 | 760 | 760 |
| Memory Maximal Frequency (MHz) |
2133 | 1066 | 1333 | 1600 | 1600 | 1600 | 1600 |
tegrastats
sudo nvpmodel --query
sudo nvpmodel -q --verbose
sudo nvpmodel -p --verbose
sudo nvpmodel -m 0 # 0 - MAXN ;
# 1 - MODE_10W ; 默认
# 2 - MODE_15W ;
# 3 - MODE_30W_ALL ;
# 4 - MODE_30W_6CORE ;
# 5 - MODE_30W_4CORE ;
# 6 - MODE_30W_2CORE ;
sudo jetson_clocks --show
echo 255 > target_pwm
sudo cp -vf target_pwm /sys/devices/pwm-fan/target_pwm # 风扇开到最大
- QT5
sudo apt-get install qt5-default qtcreator -y
sudo apt isntall libqt5charts5 libqt5charts5-dev
- ubuntu sudo 免密码
sudo tee /etc/sudoers.d/nopasswd4sudo <<- 'EOF'
nvidia ALL=(ALL) NOPASSWD : ALL
EOF
########################################
sudo cat <<EOF > /tmp/nopasswd4sudo
${USER} ALL=(ALL) NOPASSWD : ALL
EOF
sudo chown root:root /tmp/nopasswd4sudo
sudo mv /tmp/nopasswd4sudo /etc/sudoers.d/nopasswd4sudo
# 开机自启动
sudo tee -a /etc/rc.local <<- 'EOF'
#!/bin/bash
bash /enable_CAN.sh &
exit 0
EOF
sudo chmod a+x /etc/rc.local
######################
# enable_CAN.sh
######################
sudo modprobe can
sudo modprobe can_raw
sudo modprobe mttcan
#############################
# 用devmem修改寄存器
#############################
sudo busybox devmem 0x0c303000 32 0x0000C400
sudo busybox devmem 0x0c303008 32 0x0000C458
sudo busybox devmem 0x0c303010 32 0x0000C400
sudo busybox devmem 0x0c303018 32 0x0000C458
# # 检查寄存器
# sudo busybox devmem 0x0c303000 # 0x0000C055
# sudo busybox devmem 0x0c303008 # 0x0000C055
# sudo busybox devmem 0x0c303010 # 0x0000C059
# sudo busybox devmem 0x0c303018 # 0x0000C059
# 配置标准CAN 500k
sudo ip link set can0 type can bitrate 500000
sudo ip link set can1 type can bitrate 500000
# 配置为仲裁段500k, 数据段2M的的CANFD:
#sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on
#sudo ip link set can1 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on
# 设置本地回环
#sudo ip link set can0 type can bitrate 500000 loopback on
#sudo ip link set can1 type can bitrate 500000 loopback on
#sudo ip link set down can0
#sudo ip link set down can1
sudo ip link set up can0
sudo ip link set up can1
#
cansend can0 "601#b110ff"
cansend can1 "601#b110ff"
#sudo nvpmodel -m 0
sudo echo 255 > target_pwm
sudo cp -vf target_pwm /sys/devices/pwm-fan/target_pwm # 风扇开到最大
# 禁用串行控制台
#sudo systemctl stop nvgetty
#sudo systemctl disable nvgetty
#udevadm trigger # 串口 /dev/ttyTHS0
#
# sudo stty -F /dev/ttyUSB0 -a
- Jetson TX2——CAN口的使用 https://blog.csdn.net/xuezhunzhen9743/article/details/81877757
modprobe can // 插入 can 总线子系统
modprobe can-raw // 插入can 协议模块
modprobe can-bcm
modprobe can-gw
modprobe can-dev
modprobe mttcan //真正的can口支持
# 禁用串行控制台 ttyTHS*
sudo systemctl stop nvgetty
sudo systemctl disable nvgetty
udevadm trigger # 串口 /dev/ttyTHS0
# sudo usermod -a -G dialout $USER
## sudo chmod a+wrx /dev/ttyTHS0
1
sudo vim /usr/share/glib-2.0/schemas/org.gnome.Vino.gschema.xml
<!-- and go ahead and add the following key into the XML file. -->
<key name='enabled' type='b'>
<summary>Enable remote access to the desktop</summary>
<description>
If true, allows remote access to the desktop via the RFB
protocol. Users on remote machines may then connect to the
desktop using a VNC viewer.
</description>
<default>false</default>
</key>
# 更新
# Then compile the Gnome schemas with the glib-compile-schemas command.
sudo glib-compile-schemas /usr/share/glib-2.0/schemas
# 关闭 encryption of the VNC
# 或者使用图形界面配置工具 dconf editor 'sudo apt-get install dconf-editor'
gsettings set org.gnome.Vino require-encryption false
gsettings set org.gnome.Vino prompt-enabled false
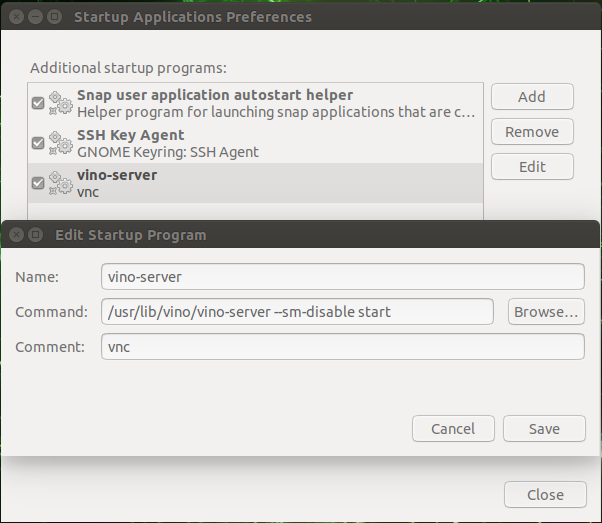
2
打开 startup applications .
添加 command /usr/lib/vino/vino-server.
然后,重启系统
3
vncviewer 192.168.2.105:5900
Jetson Nano¶
# jtop : 安装实时查看CPU,GPU状态工具
sudo pip3 install jetson-stats
jtop
# 关闭图形界面
sudo systemctl set-default multi-user.target
sudo reboot
# 开启图形界面
sudo systemctl set-default graphical.target
sudo reboot
nvidia jetson ros2 docker¶
惠普暗影精灵5 Plus¶
惠普暗影精灵5 Plus 装 ubuntu 18.04 踩到的坑.
结合这两篇Blog , 解决ubuntu 18.04 安装问题
ACPI Error: No handler or method for GPE => kernel 5.5 rc1 已经修正了这个问题。 kernel >= 5.5 的 Ubutnu 应该不存在这个问题
安装步骤 刻录 Ubuntu 18.04 U盘启动
装系统-> 选择 UEFI 启动
当看到“Try Ubuntu", “Install Ubuntu”, “…” 这个黑色界面的时候按"e",然后可以看到一段英文,把段落中的"quiet splash"修改成"nomodeset",修改完按F10重启。(重要:不这样操作可能会卡住,无法启动安装器)
安装器若启动不起来,多尝试几次.
安装过程,联网更新软件,并且勾选 第三方库安装.
===========
安装完毕,重启
在ubuntu选项上按e,进入启动命令编辑, 把段落中的"linux"打头的一行,找到quiet splash替换为text acpi=off,然后按F10启动。
进入桌面,更改为 国内源,然后 软件更新.
打开software updater,选择additional drivers,点击NVIDIA driver 435,点击Apply Changes。
安装完驱动,不要重启,打开终端,安装vim,然后sudo vim /etc/default/grub,修改一下两行:
GRUB_CMDLINE_LINUX_DEFAULT="text"
GRUB_CMDLINE_LINUX="pci=nommconf"
echo "options snd-hda-intel model=auto" | sudo tee -a /etc/modprobe.d/alsa-base.conf
echo "options snd-hda-intel dmic_detect=0" | sudo tee -a /etc/modprobe.d/alsa-base.conf
echo "blacklist snd_soc_skl" | sudo tee -a /etc/modprobe.d/blacklist.conf
shutdown -r now
usb无线wifi¶
- (AC1750) Edimax ew-7833uac on 18.04
- Need rtl8814au driver for kernel 5.3 on Ubuntu 19.10
sudo apt install git dkms
git clone https://github.com/aircrack-ng/rtl8812au.git
cd rtl8812au
sudo ./dkms-install.sh